HOME | DD
 Cardboy0 — Face Thickness importance of collision objects
Cardboy0 — Face Thickness importance of collision objects
#3d #blender #collision #softbody #soft_body
Published: 2019-11-22 11:52:29 +0000 UTC; Views: 635; Favourites: 0; Downloads: 0
Redirect to original
Description
Made in Blender 2.81
Edited into a picture with GIMP
As I have mentioned in one of my previous posts, I had trouble with using certain human models as soft bodies. Not all models though, and I realized that the main difference was the scale of the models, those who worked were pretty big, those who didnt were small or at a normal, average human size. This then led me to do some experiments to investigate the cause further, and among other results I got two important once that you can see in the picture above.
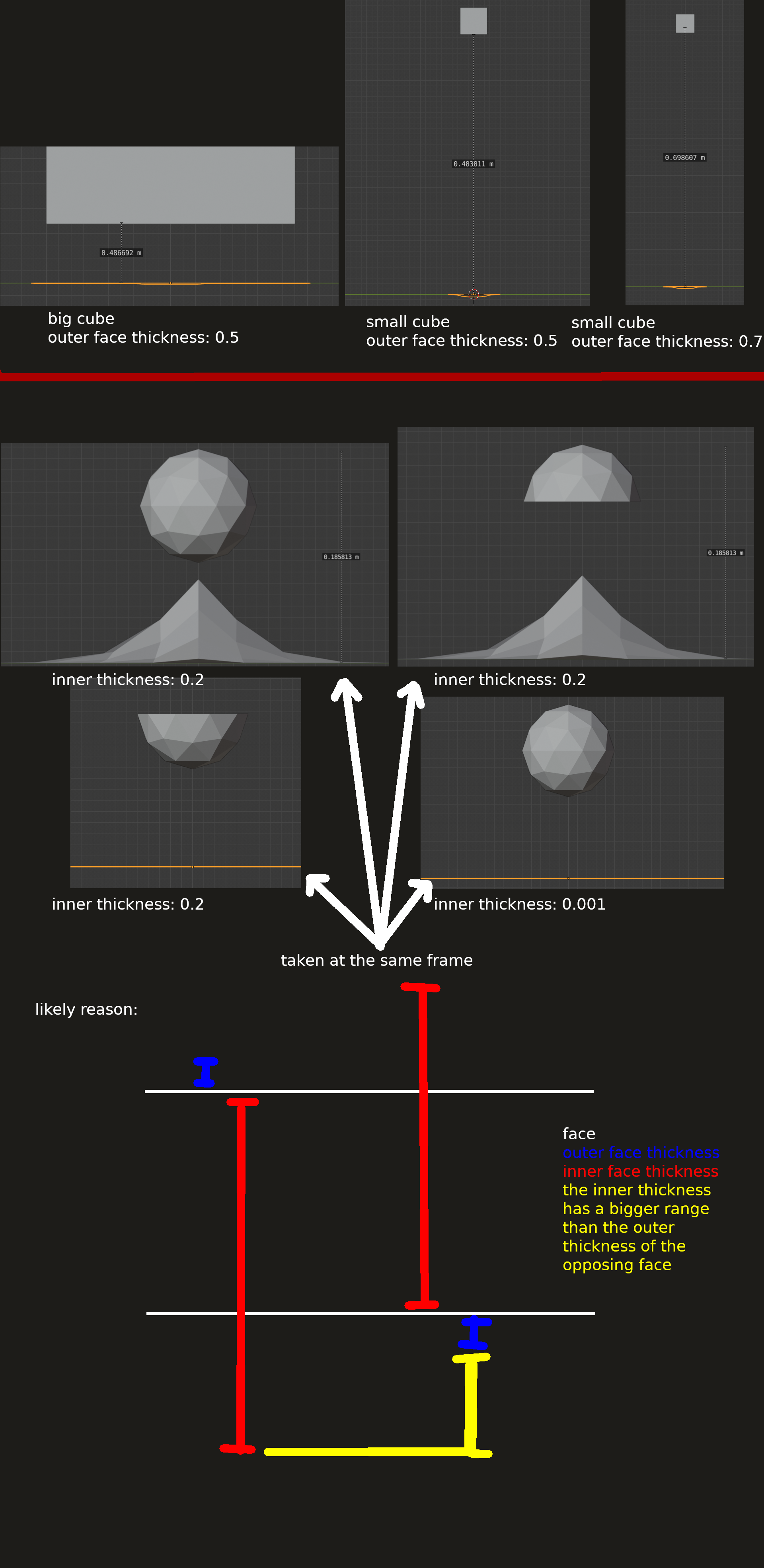
The upper depictions show a cube colliding with a soft body plane, the lower ones an Ico sphere colliding with a soft body plane. The cube was used instead of the ico sphere because the colliding faces should be parallel so measuring is easier.
1. The face thickness of your collision object isn't a relative, but an absolute value. This means that it doesn't matter if or how you scale your collision object up or down,
the thickness of the face remains the same. I found out that a value (for your outer face) of 0.5 gives you a distance of 0.5m, and 0.7 a distance of 0.7 m (see the first 3 depictions in the pic, they show the frame at which the plane started deforming), so I assume that a value of x just means x meters. I don't know why they didnt just add a "m" at the end of the thickness values, because that would have saved me time and confusion.
2. Inner and outer face-thickness of opposing faces can overlap. This is especially important in small collision objects, because the default value for the inner face thickness is 0.2, meaning 0.2 m, while the outer face thickness is only 0.02. So if the diameter of your object is less than 20cm you're going to have a problem:
As you can see in the depictions 4 - 7, I had a small Ico sphere collide with a (subdivided) plane as a soft body.
Not only can you see that the upper depictions show a collision way before it actually hits the softbody plane, the plane vertex also goes up instead of down. I presume that this is because the faces of the Ico sphere are very close together (because of the small size), and the 0.2m thickness of the inner faces actually reach out further than the outer face thickness of the opposing faces (illustrated in the sketch at the end), so the inside of the top half of the Ico sphere comes into contact with the plane first, instead of the lower half. The vertex probably goes up first because the simulation is probably programmed to put vertices who come into contact with inner faces on top of the corresponding outer face, as in "it fell down a bit into the area between outer and inner face, it needs to be put outside again by traveling up from the inner face to the direction of the upper face.) For further evidence I once used only the upper half of the Ico sphere which resulted in the same effect, and one time only the lower half which didnt show the effect and collided normally. For the last Ico sphere I decreased the inner face thickness to 0.001, and
as expected it also removes the effect.
So, the two important lessons to be learned here are:
1. If you're working at a small scale with soft bodies you need to decrease the face thickness values of your collision objects.
2. The face thickness value translates 1:1 to meters.
I thought about just decreasing both face thickness values to 0.001 but now that I think about it it would probably result in the objects travelling through the soft bodies very often, especially at greater speeds, since the frames in which vertices are in the area between outer and inner face thickness is basically 0.
I'm going to experiment further on that though.